
Цена 2 957 000 руб
-
Автоматическая система перемещения грузов
-
Переносит несколько изделий за один цикл
Особенности
| Метод подъема-схвата пневматический |
| Настраивается по силе сжатия (регулируемая 32 кг) |
| Может обслуживать несколько станков одновременно |
| Поворотная головка (разворачивается механически) |
| Аварийное отключение |
| Система подсказок |
| Система предупреждения ошибочных действий оператора |
| Режим ручного (отладки) управления |
Характеристики
| Вес переносимых изделий, кг | 20 |
| Время одной операции, не более, сек | 10 |
| Мощность, кВт | 8 |
| Габаритные размеры (ДхШхВ), не более, м | 3,8х2,6х3,4 |
| Масса, не более, кг | 2240 |
Комплектация
| Укладчик декартовый RU2 поставляется в разобранном виде (монтаж и пуско-наладка производителя) |
✔ |
| Три шкафа: шкаф управления, силовой щит, шкаф с пневмооборудованием |
✔ |
| Контроллер управления Симатик (Сименс) | ✔ |
| Модем для доп. коректировки на расстоянии | ✔ |
| Электрокабель, электрические разъёмы для подключения | ✔ |
| Воздухоподготовка (фильтр, осушитель) | ✔ |
| Разъемы для подключения сжатого воздуха | ✔ |
| Покраска – двухслойная, или полимерно-порошковая | ✔ |
| Паспорт | ✔ |
| Иинструкция по эксплуатации | ✔ |
| Транспортная упаковка | ✔ |
*Завод «Татмаш» изготовит любые системы перемещения по вашему заказу. Срок изготовления от 14 дней, после согласования с конструкторским отделом.
Видео
На видео укладчик декартовый
1. Конструкция и работа робота-укладчика
- 1. Несущая рама
- 2. Раздвижной захват
- 3. Шкаф управления
- 4. Направляющие оси Y
- 5. Направляющие оси X
- 6. Направляющие оси Z
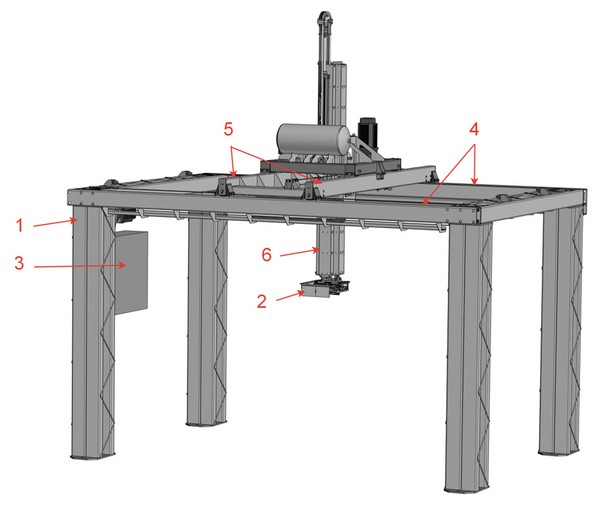
Рис. 1. Общий вид и основные узлы робота-укладчика
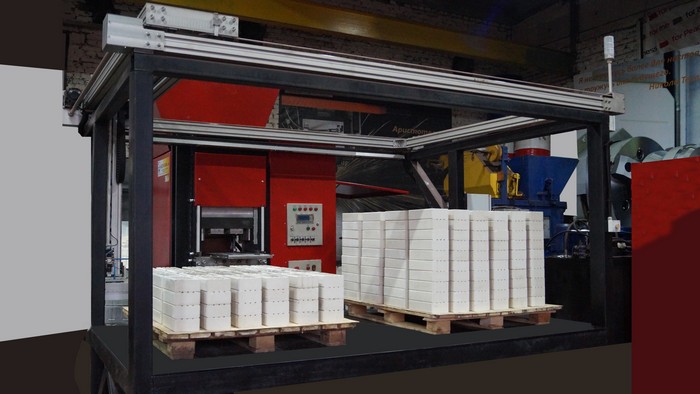
Общее описание работы робота-укладчика
Робот-укладчик забирает изготовленные прессом кирпичи со стола пресса и укладывает на две технологические паллеты согласно схеме укладки, выбранной оператором на операторской панели, расположенной на дверце шкафа управления (см. ниже). Сначала кирпичи укладываются на первую паллету, после ее наполнения, на световом индикаторе загорается зеленый свет, что говорит о том, что нужно заменить заполненную паллету на пустую, после чего необходимо нажать механическую кнопку, расположенную на колонне несущей рамы, сигнализирующая контроллеру о выполнеии замены полной паллеты на пустую. Тем временем робот-укладчик не останавливает свою работу, а продолжает укладывать кирпичи на вторую паллету, после заполнения которой, в случае замены первой паллеты, переходит к укладыванию на первую паллету и т.д. Таким образом, организована беспрерывная работа робота-укладчика.
Раздвижной грузозахват
Грузозахват спроектирован и изготовлен для одновременного захватывания четырех изделий размерами 100х100х100 мм.
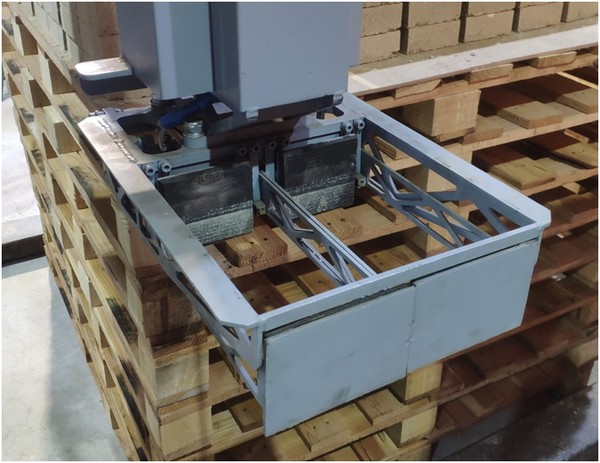
Рис. 2. Раздвижной грузозахват
Фильтр-регулятор
Фильтр-регулятор очищает сжатый воздух, вылавливая из него твердые частицы и образовавшийся конденсат, за уровнем которого необходимо следить не давая заполниться выше отметки «max». Конденсат нужно сливать путем подъема вверх на несколько миллиметров детали, указанной на фотографии красной стрелкой.
Также на фильтр-регуояторе производится регулировка усилия захватывания укладываемых изделий.
Регулировка усилия захватывания производится путем регулирования давления на регуляторе давления. Для этого необходимо приподнять верхний серый «колпачек» и прокрутить в соответствующую сторону до достижения необходимого показания давления на манометре.
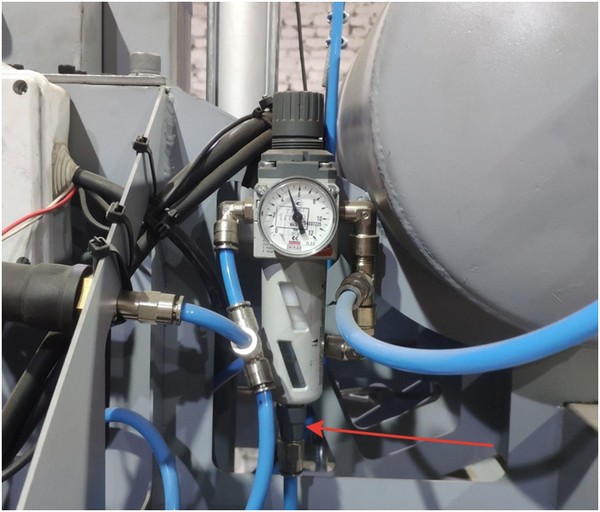
Рис. 3. Фильтр-регулятор
Пульт управления
Пульт управления представляет собой сенсорную операторскую панель, установленную на дверце шкафа управления. На пульте размещены все необходимы элементы управления и контроля работы робота-укладчика в ручном и автоматическом режимах, а также в режиме настройки. На сенсорном экране пульта управления отображаются рабочие параметры и заданные значения настроек.

Рис. 4. Пульт управления роботом-укладчиком
Шкаф устройств управления
Расположение шкафа устройств управления зависит от условий на участке установки робота-укладчика. В этом шкафу размещено электрооборудование, необходимое для управления роботом-укладчиком.
2. Обзор датчиков, установленных на укладчике
Датчик HOME
На работе укладчике по осям X, Y, Z установлены дачики для обнуления машинных координат робота. Датчики регистрируют возникновение металлического предмета напротив датчика.
Номинальное рабочее расстояние срабатывания датчика равно 15мм.
В случае если датчик не срабатывает, необходимо отрегулировать зазор между датчиком и металлическойпластиной, установленной на конструкции рамы. На рисунке 5.1, 5.2 указаны места расположения пластины и датчика.
Для оси Z в качестве датчика HOME используется геркон, установленный на пневмоцилиндре. Датчик срабатывает в зависимости от положения поршня пневмоцилиндра.

Рис. 5.1. Датчик HOME

Рис. 5.2. Геркон на оси Z (датчик HOME)
Датчик коррекции по оси Z
Датчик коррекции по оси Z расположен в верхней части оси Z. При наезде оси Z на препятствие при укладке продукта следующее движение робота будет скорректировано.
Расположение датчика представлено на рисунке 6.

Рисунок 6. Датчик коррекции по оси Z
Датчики на грузозахвате «Брак»
В пазах на нижней стороне пневмоцилиндров грузозахвата имеются два герконовых датчика, срабатывание которых сигнализирует о том, что захват закрылся на менее чем 200 мм, значит, захватываемые изделия либо отсутствуют, либо бракованные и развалились.
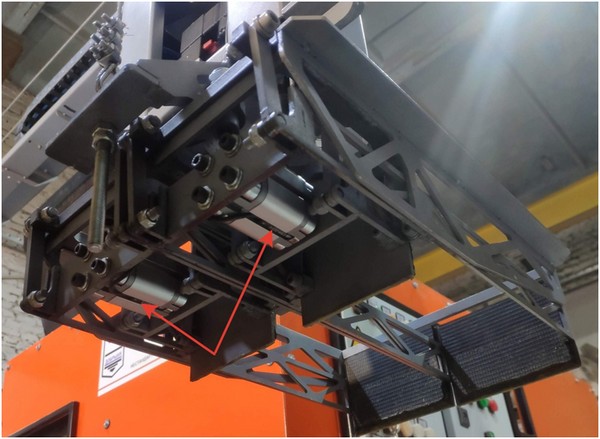
Рис. 7. Герконовые датчики на пневмоцилиндрах грузозахвата